
'Range: 300 meters' it says in big letters on the website. "This is perfect!" You pull out your credit card, buy the Lidar unit and wait for FedEx to drop it off. Once you receive it, you go to a local parking lot, put the Lidar on a tripod and fire it up for the first time. In the visualizer, you try to look for your nice dark-grey car that you parked about 100 meters away.'Range: 300 meters' it says in big letters on the website. "This is perfect!" You pull out your credit card, buy the Lidar unit and wait for FedEx to drop it off. Once you receive it, you go to a local parking lot, put the Lidar on a tripod and fire it up for the first time. In the visualizer, you try to look for your nice dark-grey car that you parked about 100 meters away.
You look for a couple of minutes and you think you may see a couple of points, but nothing near the actual shape of your vehicle. Your launch the perception software that you bought in addition to the sensor, and it does not detect anything. "What the F**? Did the Lidar company lie to me?"
I have been on the receiving end of the subsequent support call more times than I care to remember. What follows is a careful dance of datasheet lingo, definitions, perception limitations and whatever else can explain this phenomenon. It is an awkward conversation, and the disappointment of the customer is often palpable. Did the Lidar company lie? The short answer is: "No" or, at best: "Not really". The longer answer is that crucial information was not shared. This is one of the reasons I decided to start this company, to clear up some of these issues and to educate the industry.
In a series of articles, I will attempt to explain the practical applications of Lidar and translate the technical terminology into something a non-expert can understand. I will start by explaining what 'Lidar Range' actually means.
After "What's the price?", the second most asked question about Lidar is "What's the range?". Unfortunately, 'range' is one of the most misunderstood terms in the Lidar industry. Range in a lab environment is very different from range in a practical environment and during the sale process, these worlds collide.
When a Lidar is designed and manufactured, it goes through a series of tests to determine what the maximum range is. Unfortunately, there is no industry standard for what this test should be, so naturally, Lidar companies create tests that generate the best numbers. In the competitive business environment that they operate in, they have to. If they don't, their competitor will.
I will now introduce four terms that I have used in the last couple of years in conversations with customers. These are four types of ranges and quick ways to calculate them. If done correctly, this should set proper expectations while maintaining the integrity of everyone involved.
Sensor Range
Detection Range
Tracking Range
Classification Range
Sensor Range
The maximum range at which there is enough energy returned for a Lidar sensor to detect a return signal. This is a lab-based best-case scenario created to detect a single point over time, which can be several seconds.
For all practical purposes, you will never reach this range in the real world. Once you have used it to create ballpark numbers of the next three types of range, forget this number even exists.
This is the number listed in the sensor datasheet!
Detection Range
The maximum range at which a Perception System can detect that something is moving but is not yet able to track it. The object will have to be at least the size of a human.
Tracking Range
The maximum range at which a Perception System can track a human sized object with 90% accuracy but is not yet able to determine what the object is. It knows something is moving, it knows where it is going and it has some idea about what object it is but is not certain.
Classification Range
The maximum range at which a Perception System can track and classify an human sized object with 90% accuracy. It knows something is there, it knows where it is going, and it knows what the object is
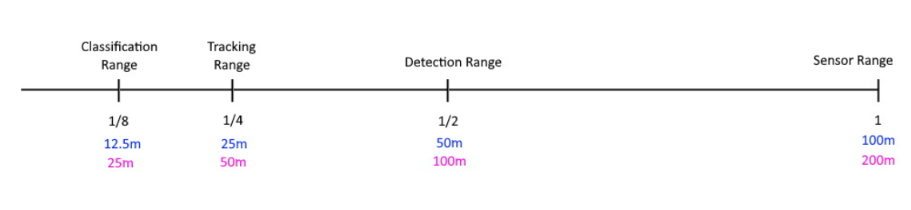
To calculate the ranges using the Sensor Range as a reference, simply divide by two for each subsequent range type. For example: if the range value on the Lidar datasheet reads 200 meters, divide this number by two to get the Detection Range (100m), divide it again to get the Tracking Range (50m) and again for the Classification Range (25m). These numbers line up closely with empirical data.
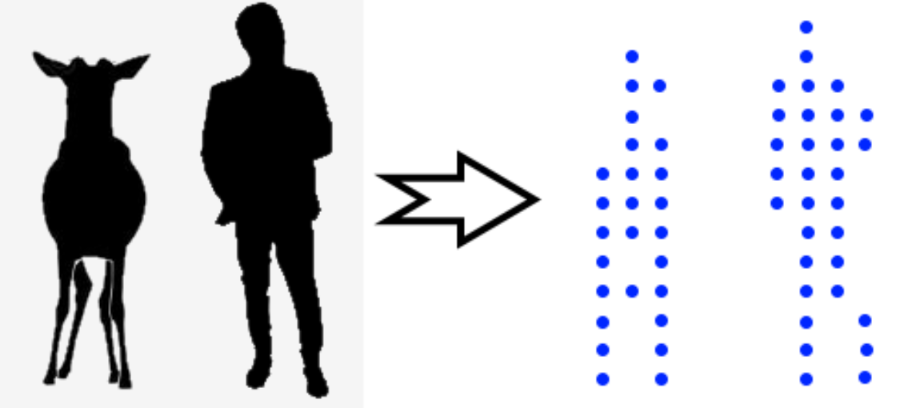
The ranges might seem short, but these ranges are values that guarantee the accuracy that the real world requires. Classification range for example; imagine a deer walking straight towards your lidar. The silhouette is not that different from a human. The image on the right is a point cloud image of a human at ~25m with a 128 beam lidar. This is between 25 and 35 points on target. This shows it is nearly impossible to tell the difference between a deer and a human.
This mis-classification may not sound like a big deal, but in the security business this is the difference between a true alarm and a nuisance alarm, which translates directly into cost of operation. Again, the practical world has a different set of requirements than the lab environment in which these sensors are designed.
Another practical example is one I personally experienced. Without giving too much detail, I was brought in as a consultant on a project based around vehicle safety and required a very high accuracy of tracking of vehicles at a range of 50m and in. We tested a number of sensors and I had to reject one of them because it was unable to track black vehicles beyond 25 meters. The Lidar manufacturer insisted that the sensor could track up to 100m, but reality was that no matter how much we tweaked the perception system, it simply lost track of vehicles too early. To this day I don't think the Lidar company has forgiven me, but when people's lives are at stake, we simply could not use this unit. Had we done the above range calculation, we would have known immediately because the Sensor Range was defined by the manufacturer as 100 meters, which means the maximum Tracking Range would be 25 meters, which is what it was on average.
Disclaimers
I expect post will cause some controversy. Keep in mind that:
A) These numbers are reference numbers. Each Lidar will act differently and the actual numbers for that particular type and model will be slightly different from the base calculation.
B) I am talking about real-life scenario's, not best-case scenario's. This includes bright sunlight causing reflections, rain, snow, dark objects, small objects, waving vegetation, partially occluded objects, dirty lens caps, older sensors (lasers lose power over time), overheating units and so on. I have seen the occasional accurate tracking of a human at 100m even with an 8-beam sensor, but I am talking about >90% accuracy over time, not a single dedicated scenario lasting less than 10 seconds. The end-customers live in the real world, not a lab.
C) These values are for single-lidar setups only. With multiple Lidar units overlapping, it is possible to stretch these values. A perfect setup with near-perfect calibration can add about 50% range. So, a 50m Tracking Range would become 75m in a multi-Lidar setup.
D) In a future article I will dig down into technical details of all the factors involved in the ability for a Lidar to detect signal return energy. This should help people understand why the range is what it is and understand how Lidar companies come up with their numbers.
